AI-gestuurde lasrobot voor maritiem onderhoud onderwater
Om ervoor te zorgen dat maritieme infrastructuur niet langer uitsluitend door professionele industriële duikers onderhouden hoeft te worden, heeft een onderzoeksconsortium onder leiding van het Duitse Onderzoekscentrum voor Kunstmatige Intelligentie (DFKI) een innovatieve onderwaterlasrobot ontwikkeld. Met behulp van kunstmatige intelligentie (AI), moderne sensortechnologie en een onderwaterrobotarm moet het systeem autonome laswerkzaamheden mogelijk maken.
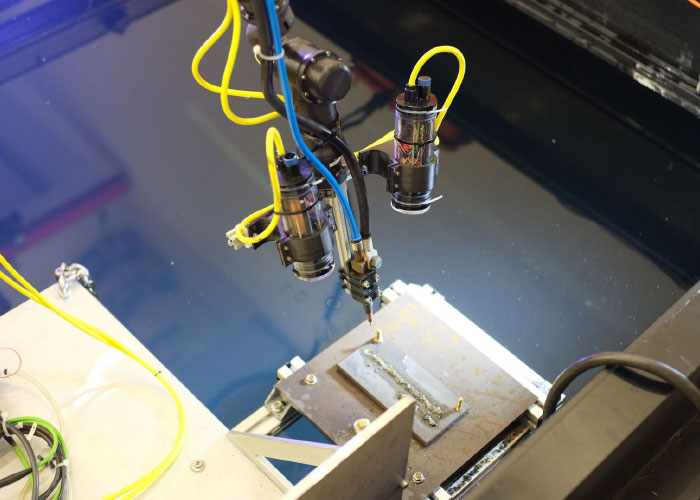
Robot en lasnaad na een test.
Tot nu toe worden onderwaterlaswerkzaamheden, zoals reparaties aan haveninstallaties, offshoreconstructies en andere metalen bouwwerken, handmatig uitgevoerd. De vraag overstijgt echter ruimschoots het aantal beschikbare vakmensen. Hierop speelde het project MARIOW (Maritime AI-Guided & Remote Operated Welding) in: voor het eerst ontwikkelden de partners een robotsysteem dat onderwaterlaswerkzaamheden grotendeels autonoom kan uitvoeren. Het systeem moet duikers in de toekomst ontlasten bij fysiek zware en risicovolle taken en tegelijkertijd preciezere en gelijkmatigere lasnaden produceren, zelfs onder moeilijke zichtomstandigheden.
Modulaire onderwatermanipulator
Het centrale element van het systeem is een door het DFKI ontwikkelde modulaire onderwatermanipulator. De robotarm kan worden ingezet tot een diepte van 6.000 meter, heeft een reikwijdte van 2 meter en kan flexibel worden aangepast aan verschillende inzetscenario’s. Door een combinatie van decentrale gewrichtsregeling en overkoepelende bewegingsplanning voert de manipulator de laswerkzaamheden nauwkeurig en reproduceerbaar uit.
AI bepaalt lastraject
Een ander kernonderdeel van het MARIOW-systeem is de AI-gestuurde bepaling van het lastraject. Het door Fraunhofer IGD ontwikkelde stereocamerasysteem levert hogeresolutie-onderwaterbeelden direct bij de lasbrander. Op basis hiervan ontwikkelde en trainde het Laboratorium voor Autonome Systemen van de TH Köln AI-modellen die lasnaden en hun begin- en eindpunten autonoom herkennen. Vervolgens berekent de AI de optimale beweging van de robot.
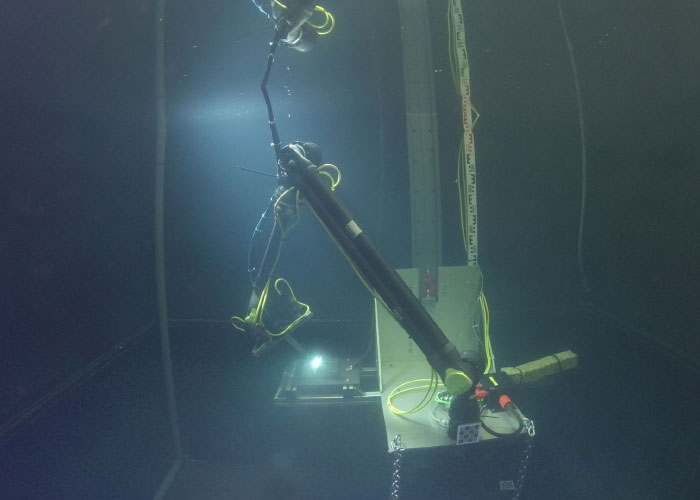
De robot tijdens het autonoom lassen van een hoeklas in het testbassin.
Een doorslaggevende technologische vooruitgang is het gevulde-draad-lasproces, dat onderwaterlassen voor het eerst betrouwbaar automatiseerbaar maakt. Het door het Instituut voor Materiaal- en Procestechniek van de TH Köln samen met AMT ontwikkelde underwater flux-cored arc welding (UW-FCAW)-proces vervangt de traditionele staafelektroden, die al na enkele centimeters lasnaad moeten worden verwisseld, door een continue draad. Deze ononderbroken materiaaltoevoer vormt de basis voor stabiele, gecontroleerde en reproduceerbare lasnaden.
Succesvolle einddemonstratie
In de laatste projectfase werden alle deeltechnologieën samengebracht en praktijkgericht gedemonstreerd in het onderwatertestbassin van het DFKI in Bremen. Daarbij werd de volledige AI-gebaseerde bepaling van de laslijn, de geautomatiseerde planning van het laspad en het uiteindelijke lassen met behulp van het UW-FCAW-proces gerealiseerd. “We konden aantonen dat geautomatiseerd gevulde-draad-lassen onder water realiseerbaar is. Daarmee hebben we de basis gelegd voor een wereldwijd unieke technologie met groot potentieel voor de maritieme economie”, aldus Christian Koch, projectleider bij het DFKI Robotics Innovation Center.
In toekomstige projecten wil het consortium deze resultaten verder uitbouwen. Naast het verbeteren van de laskwaliteit zal vooral de praktische inzet in havenbekkens centraal staan. De invloed van zout water, stroming en golfslag zal dan een aanpassing van de bestaande systemen noodzakelijk maken. Bovendien nemen door de hogere druk op grotere diepte de eisen aan componenten toe, bijvoorbeeld wat betreft afdichting. Tot slot zal een lasersysteem worden geïntegreerd dat de tijdens het lassen ontstane slak verwijdert.